这周主要根据jps路径搜索算法的定义,尝试实现jps算法。
jps算法全称是jump point search,它可以看做A* 的改进算法,首先简要简绍A*算法原理
A*算法
A*算法的一些概念
G:当前位置距离原点已经走过的距离
H:当前位置距离终点的预估距离
F:F=G+H,作为每个点的权重
搜索方法
将原点加入openlist中,每当openlist有值就遍历openlist中的点,每次遍历首先找出F值最小的节点作为当前点,遍历后的加入另一个列表防止重复遍历。
遍历当前点的邻居,没有遍历过的点设置G和H值,设置父节点,之后加入openlist中。
由此往复这个过程,直到找到目标点。
在A*算法的寻路过程中将很多畅通无阻的点也加入了openlist,这是可以改进的
JPS算法
A*将各个邻居都加入了openlist,之后算的F值,实际上能舍弃很多不需要的节点。
jps算法引入了一些新概念。
JPS算法增加的概念
跳点

对于跳点的理解如图a,点y对于p(x)是跳点,p(x)与点y之间没有障碍,畅通无阻,可直接从p(x)跳跃到y点。不需要像A*算法一样,将右上方,x,右下方都加进openlist来找最小的权重值F的节点。
jps的大致步骤如图b
由p(x)点出发寻找一点,首先向p(x)的上下左右方向各找跳点,等找到地图边界或者遇到障碍就返回。之后向四个对角线方向各进一步,如果是跳点加入openlist后直接返回;如果不是接着找上下左右四个方向的跳点,将跳点加入openlist。
根据上面说的得出结论:
- 有强迫邻居的节点是跳点
- 当前节点是个跳转点。当前节点的上一个跳点在对角线方向,后一个跳点在当前节点的正方向(也就是拐弯了),那么当前节点也是跳点。
舍弃不需要的邻居节点
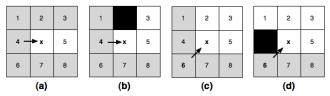
(x表示当前节点,黑色方块表示障碍)
在没有障碍情况下,只考虑直行情况
图a,节点4到x,可舍弃123678节点。
图c,节点6到x,可舍弃1478节点。
存在障碍情况下,需要考虑强制节点
图b,节点3对于节点x是强制节点。
图d,节点1对于节点x是强制节点。
强制邻居
图b,从x到节点3必须经过x,3就是x的强制邻居。
图d,同上。
搜索方法
第一步
查找起点四个方向的跳点,之后搜索对角线四个方向,在四个节点中,分别找当前对角线向量x,y分量方向的跳点。当找到跳点,加入openlist。之后各个对角线方向的点各前进一步,如果找到跳点就加入openlist后直接返回;如果不是跳点就接着按x,y方向找跳点,直到碰到障碍,或者到达地图边界。
第二步
while(openlist.Length>0),每次找到F最低的节点,从openlist中移除,之后和第一步 类似,直到找到目标点。
JPS的优化
- 剪枝优化,不是论文中的减去邻居节点,而是如图一b的从x到y到z中的y节点可以不加入openlist中,只保留x与z节点。之后进行判断,填充y节点到路径中。这样就可以避免y节点不必要的运算。
- 位运算,0表示可行走,1表示障碍。将每行每列就能用0和1来表示。判断是否有障碍就能提升速度。
- jps预处理,也称JPS+,略,不支持可移动障碍物。